 assets/3eLoi_apesanteur.mp4
assets/3eLoi_apesanteur.mp4 assets/3eLoi_apesanteur.mp4
La dynamique est la branche de la mécanique qui relie les mouvements à leurs causes : les forces.
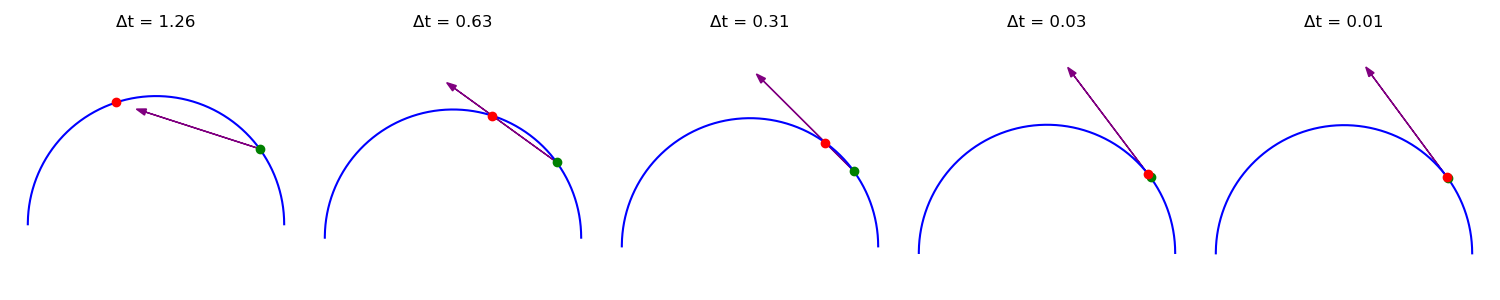
Le vecteur vitesse \(\vec{v_i}\) représente la vitesse instantanée d’un solide au point \(i\).

Caractéristiques :
Notation : \(\vec{v_i}\)
Calcul : \(\vec{v_i} = \frac{\overrightarrow{M_{i-1}M_{i+1}}}{2·\Delta t}\)
calcul de vecteur vitesse|\(\vec{v_i} = \frac{\overrightarrow{M_{i-1}M_{i+1}}}{2·\Delta t}\qquad\frac{distance}{durée}\)
Le vecteur variation de vitesse au point \(i\) se note \(\overrightarrow{\Delta v_i}\).
\[\overrightarrow{\Delta v_i} = \overrightarrow{v_{i+1}} - \overrightarrow{v_{i}}\]
Si \(\overrightarrow{V_5} = \begin{pmatrix}3\\7\end{pmatrix}\), et \(\overrightarrow{V_6} = \begin{pmatrix}5\\8\end{pmatrix}\), alors \(\overrightarrow{\Delta V_5} = \begin{pmatrix}5-3\\8-7\end{pmatrix}=\begin{pmatrix}2\\1\end{pmatrix}\)
calcul du vecteur variation de vitesse|\[\overrightarrow{\Delta v_i} = \overrightarrow{v_{i+1}} - \overrightarrow{v_{i}}\]
méthode :
exercice
En 2021, Devonte Graham, joueur des New Orleans Pelicans a marqué le plus long buzzer beater de tous les temps (18,6m)
assets/New_Orleans_Pelicans_Devonte_Graham_buzzer_beater.mp4
Voici une représentation de la trajectoire du ballon lors du shoot :

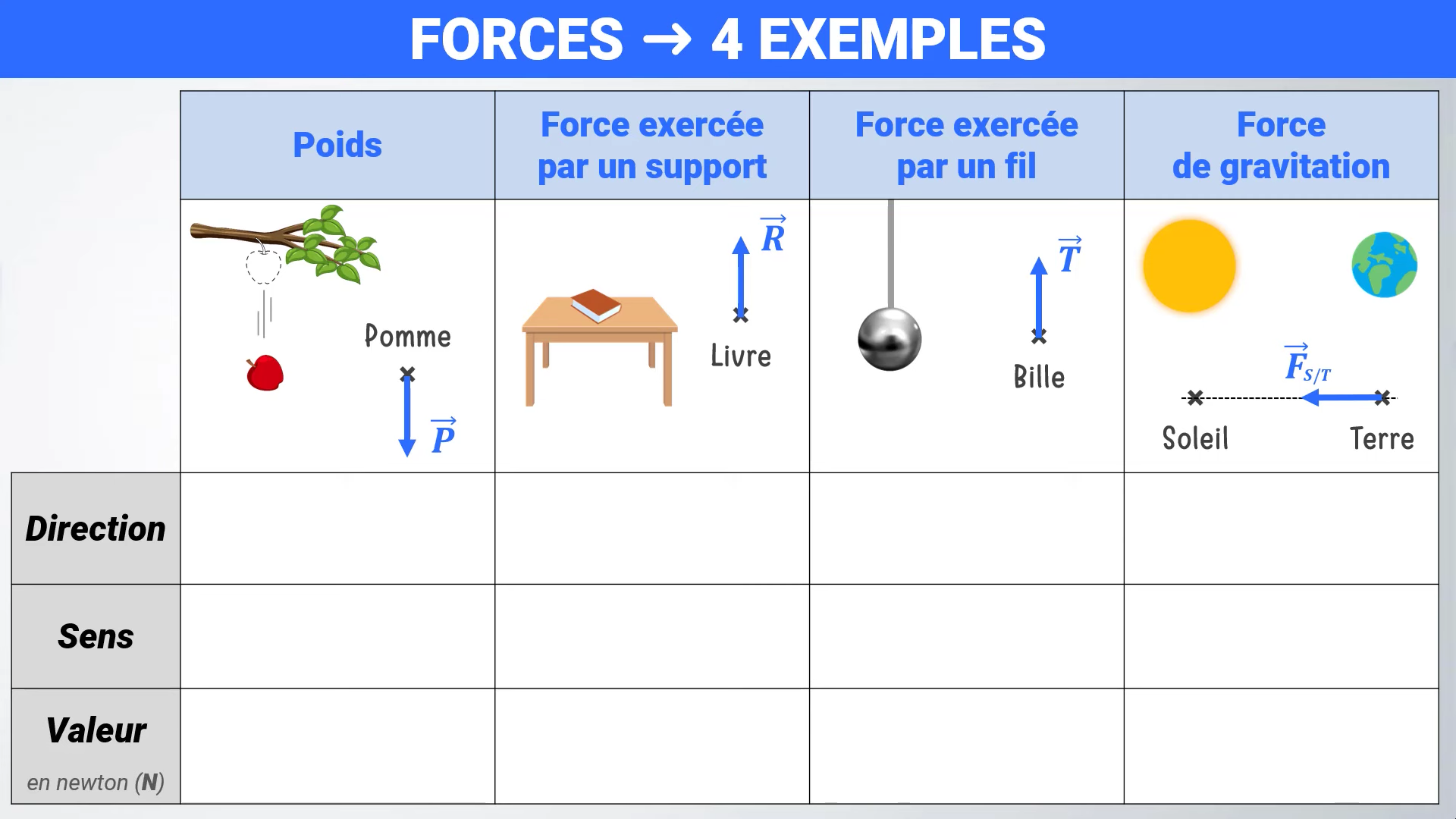
On définit \(\sum{\vec{F}}\) comme la somme des forces appliquées à l’objet étudié.
Principe fondamental de la dynamique : (ou 2e loi de Newton)
\[\frac{\Delta \vec{v}}{\Delta t} = \frac{\sum \vec{F}}{m}\]
L’accélération d’un objet M est proportionnelle à la somme des forces appliquées à cet objet divisé par la masse de l’objet.
principe fondamental de la dynamique|\[\frac{\Delta \vec{v}}{\Delta t} = \frac{\sum \vec{F}}{m}\]
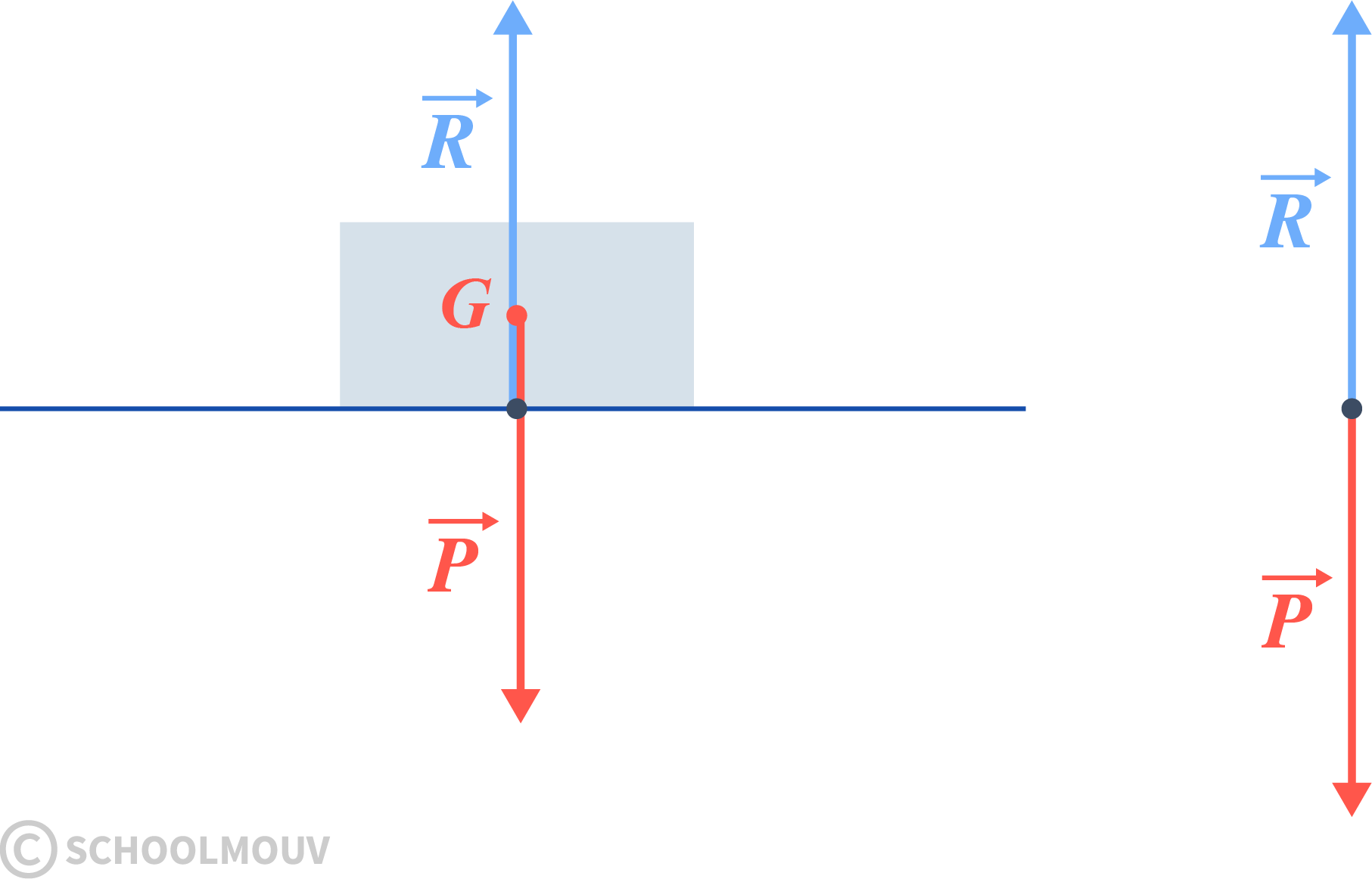
On retrouve le principe d’inertie, lorsque \(\vec{F} = 0\), alors \(\vec{a}=\vec{0}\), le mouvement est rectiligne uniforme.